
Projects
Ongoing Open Source Projects
MC-Calib: calibration toolbox for multi-camera systems
https://github.com/rameau-fr/MC-Calib
Lab Projects
Look Ahead by Shared Sensing for Cooperative Cars

We propose a novel collaborative cars method which allows a driver to literally see through the front vehicle to assist in overtaking maneuvers. In the studied scenario, both cars are equipped with cameras (stereo and monocular cameras for the front and the rear cars, respectively) and share data through an appropriated wireless communication system. Our method generates a seamless transparency effect from the rear car viewpoint using trifocal tensor image synthesis where the poses of the cameras are estimated using a marker-based pose estimation.
- Responsibilities:
- Developing highly optimized multi-threaded modules of co-SLAM
- Implementing algorithm to homogenously distribute points all over the image.
Intelligent Assistant for People With Low Vision Abilities
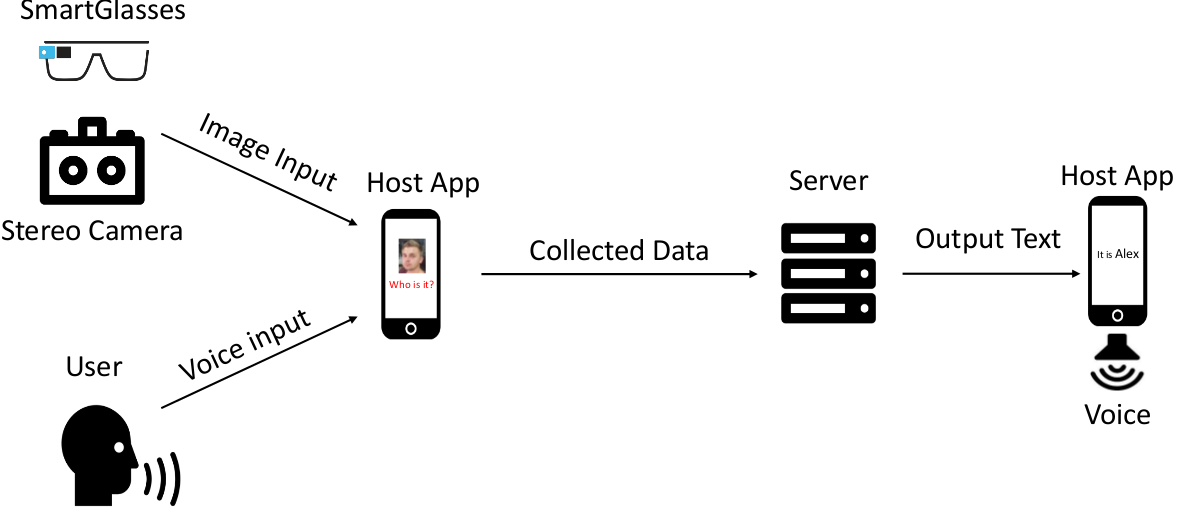

- Responsibilities:
- Supervising two undergraduate students to implement mobile solution equipped with CV and ML algorithms.
- Researching and implementation of depth question answering.
Machine learning-based autonomous vehicle vision system

- Responsibilities:
- Lanes, traffic signs, and road markings detection using Convolutional Neural Network.
Undergraduate Projects
Real Time Face Tracking Projector

This software solves the problem of getting blinded or distracted from giving a presentation by the light that is projected on a presenter’s eyes from a projector. This software blacks out the region where presenter’s face is located. When face region is blacked out, it has been proven that presenters do not feel any discomfort and do not get distracted. Software continuously finds face’s location, thus, presenter’s face is always blacked out.
Image Transfer Through LEDs
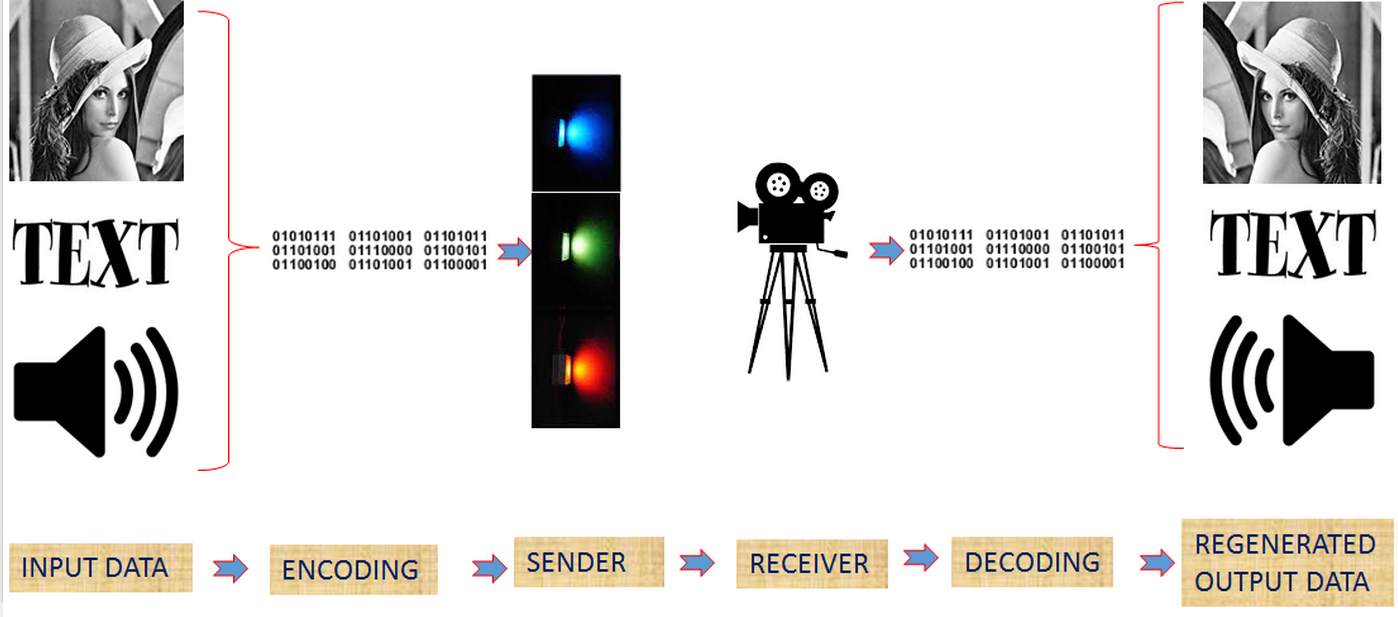
In this Project we took the opportunity to develop a reliable method for navigation inside buildings (usually big saturated buildings like libraries) where it’s often hard to reference oneself inside the building and where technologies like GPS fail to do so as well. As a medium, we use LEDs to send data, while on the other side, a web camera is used to record the sent data in real time and reproduce the original data at the receiver side.
Automatized Wall Painting Drone


This project aims to develop an Automatized Wall Painting Drone that is able to draw pre-decided images on a wall on an automatized basis without human interaction apart from the picture input. Apart from saving human lives the proposed drone is expected to have higher efficiency, cheaper cost and safer to the surroundings compared to the original way of conducting painting jobs on tall buildings.